20 KiB
Отчёт по Теме 7
Таболин Иван, А-01-23
1. Запуск и настройка.
Запустил среду IDLE и выполнил настрйоку рабочего каталога.
import os
os.chdir('C:\\Users\\User\\Desktop\\python-labs\\TEMA7')
2. Создание пользовательской функции.
Создание функции предполагает выполнение трех операций: формирование функции, ее сохранение и использование.
2.1. Пример 1.
Функция без аргументов.
def uspeh():
"""Подтверждение успеха операции"""
print('Выполнено успешно')
uspeh()
Выполнено успешно
Тип объекта - function
type(uspeh)
<class 'function'>
dir()
['__annotations__', '__builtins__', '__doc__', '__loader__', '__name__', '__package__', '__spec__', 'os', 'uspeh']
help(uspeh)
Help on function uspeh in module __main__:
uspeh()
Подтверждение успеха операции
В качестве помощи по созданной функции выводится сообщение с комментарием, который мы оставили при создании функции.
2.2. Пример 2.
Функция с аргументами.
def sravnenie(a,b):
"""Сравнение a и b"""
if a>b:
print(a,'больше',b)
elif a<b:
print(a,'меньше',b)
else:
print(a,'равно',b)
uspeh()
sravnenie(7,8)
7 меньше 8
Выполнено успешно
sravnenie(10,10)
10 равно 10
Выполнено успешно
sravnenie(10,5)
10 больше 5
Выполнено успешно
sravnenie('a','bcd')
a меньше bcd
Выполнено успешно
sravnenie('abcdefg','h')
abcdefg меньше h
Выполнено успешно
sravnenie('abc','abc')
abc равно abc
Выполнено успешно
2.3. Пример 3.
Функция, содержащая return.
def logistfun(b,a):
"""Вычисление логистической функции"""
import math
return a/(1+math.exp(-b))
v,w=1,0.7;z=logistfun(w,v)
print(v,'/(1+e^(-',w,')) = ', round(z,3))
1 /(1+e^(- 0.7 )) = 0.668
2.4. Пример 4.
Сложение для разных типов аргументов.
def slozh(a1,a2,a3,a4):
"""Сложение значений четырех аргументов"""
return a1+a2+a3+a4
slozh(1,2,3,4)
10
slozh('1','2','3','4')
'1234'
b1=[1,2];b2=[-1,-2];b3=[0,2];b4=[-1,1]
q=slozh(b1,b2,b3,b4);print(q)
[1, 2, -1, -2, 0, 2, -1, 1]
k1=(1,2,3);k2=(4,5,6)
k3=(7,8,9);k4=(10,11,12)
slozh(k1,k2,k3,k4)
(1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12)
sl1={'A':1,'B':2};sl2={'C':3,'D':4};sl3={'E':5,'F':6};sl4={'G':7,'H':8}
slozh(sl1,sl2,sl3,sl4)
Traceback (most recent call last):
File "<pyshell#64>", line 1, in <module>
slozh(sl1,sl2,sl3,sl4)
File "<pyshell#45>", line 3, in slozh
return a1+a2+a3+a4
TypeError: unsupported operand type(s) for +: 'dict' and 'dict'
mn1={1,2,3};mn2={3,4};mn3={5,6};mn4={7,8}
slozh(mn1,mn2,mn3,mn4)
Traceback (most recent call last):
File "<pyshell#67>", line 1, in <module>
slozh(mn1,mn2,mn3,mn4)
File "<pyshell#45>", line 3, in slozh
return a1+a2+a3+a4
TypeError: unsupported operand type(s) for +: 'set' and 'set'
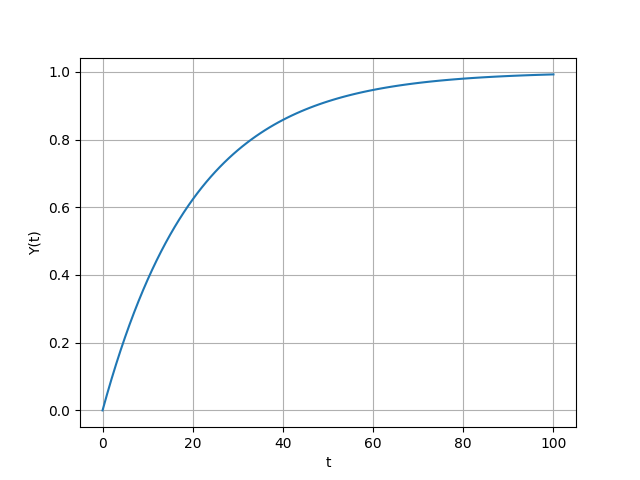
2.5. Четвертый пример.
Функция, реализующая модель некоторого устройства, на вход которого в текущий момент поступает сигнал х, на выходе получается сигнал у:
def inerz(x,T,ypred):
"""Модель устройства с памятью:
x - текущее значение вх. сигнала
T - постоянная времени
ypred - предыдущее значение выхода устройства"""
y=(x+T*ypred)/(T+1)
return y
sps=[0]+[1]*100
spsy=[]
TT=20
yy=0
for xx in sps:
yy=inerz(xx,TT,yy)
spsy.append(yy)
import matplotlib.pyplot as plt
plt.plot(spsy)
[<matplotlib.lines.Line2D object at 0x000001AFB35E9590>]
plt.grid(True)
plt.xlabel('t')
Text(0.5, 0, 't')
plt.ylabel('Y(t)')
Text(0, 0.5, 'Y(t)')
plt.show()
3. Функции как объекты.
3.1. Получение списка атрибутов объекта-функции.
dir(inerz)
['__annotations__', '__builtins__', '__call__', '__class__', '__closure__', '__code__', '__defaults__', '__delattr__', '__dict__', '__dir__', '__doc__', '__eq__', '__format__', '__ge__', '__get__', '__getattribute__', '__getstate__', '__globals__', '__gt__', '__hash__', '__init__', '__init_subclass__', '__kwdefaults__', '__le__', '__lt__', '__module__', '__name__', '__ne__', '__new__', '__qualname__', '__reduce__', '__reduce_ex__', '__repr__', '__setattr__', '__sizeof__', '__str__', '__subclasshook__', '__type_params__']
inerz.__doc__
'Модель устройства с памятью:\nx - текущее значение вх. сигнала\nT - постоянная времени\nypred - предыдущее значение выхода устройства'
help(inerz)
Help on function inerz in module __main__:
inerz(x, T, ypred)
Модель устройства с памятью:
x - текущее значение вх. сигнала
T - постоянная времени
ypred - предыдущее значение выхода устройства
3.1. Сохранение ссылки на объект-функцию в другой переменной.
fnkt=sravnenie
v=16
fnkt(v,23)
16 меньше 23
Выполнено успешно
3.3. Возможность альтернативного определения функции в программе.
typ_fun=8
if typ_fun==1:
def func():
print('Функция1')
else:
def func():
print('Функция2')
func()
Функция2
Функция func() определена вторым определением, так как typ_fun=8 != 1.
4. Аргументы функции.
4.1. Использование функции в качестве аргумента другой функции.
def fun_arg(fff,a,b,c):
"""fff-имя функции, используемой
в качестве аргумента функции fun_arg"""
return a+fff(c,b)
zz=fun_arg(logistfun,-3,1,0.7)
print(zz)
-2.3318122278318336
4.2. Обязательные и необязательные аргументы.
def logistfun(a,b=1):
"""Вычисление логистической функции"""
import math
return b/(1+math.exp(-a))
logistfun(0.7)
0.6681877721681662
logistfun(0.7,2)
1.3363755443363323
4.3. Обращение к функции с произвольным расположением аргументов.
logistfun(b=0.5, a=0.8)
0.34498724056380625
4.4. Значения аргументов функции, содержатся в списке или кортеже.
b1234=[b1,b2,b3,b4]
qq=slozh(*b1234)
print(qq)
[1, 2, -1, -2, 0, 2, -1, 1]
4.5. Аргументы функции содержатся в словаре.
dic4={"a1":1,"a2":2,"a3":3,"a4":4}
qqq=slozh(**dic4)
print(qqq)
10
4.6. Смешанные ссылки.
e1=(-1,6);dd2={'a3':3,'a4':9}
qqqq=slozh(*e1,**dd2)
print(qqqq)
17
4.7. Переменное число аргументов у функции.
def func4(*kort7):
"""Произвольное число аргументов в составе кортежа"""
smm=0
for elt in kort7:
smm+=elt
return smm
func4(-1,2)
1
func4(-1,2,0,3,6)
10
4.8. Комбинация аргументов.
def func4(a,b=7,*kort7):
"""Кортеж - сборка - должен быть последним!"""
smm=0
for elt in kort7:
smm+=elt
return a*smm+b
func4(-1,2,0,3,6)
-7
4.9. Изменение значений объектов, используемых в качестве аргументов функции.
a=90
def func3(b):
b=5*b+67
func3(a);print(a)
90
Число - неизменяемый тип объекта
sps1=[1,2,3,4]
def func2(sps):
sps1[1]=99
func2(sps1)
print(sps1)
[1, 99, 3, 4]
Список - измеяемый тип объекта
kort=(1,2,3,4)
func2(kort);print(kort)
(1, 2, 3, 4)
Кортеж - неизменяемый тип объекта
5. Специальный типы пользовательских функций.
5.1. Анонимные функции.
# Анонимная функция без аргументов
anfun1=lambda: 1.5+math.log10(17.23)
anfun1()
2.7362852774480286
# Анонимная функция с 2 аргументами
anfun2=lambda a,b: a+math.log10(b)
anfun2(17,234)
19.369215857410143
# Функция с необязательным вторым аргументом
anfun3=lambda a,b=234: a+math.log10(b)
anfun3(100)
102.36921585741014
5.2. Функции-генераторы.
def func5(diap,shag):
""" ИтераторБ возвращающий значения
из диапазона от 1 до diapс шагом shag"""
for j in range(1, diap+1,shag):
yield j
for mm in func5(7,3):
print(mm)
1
4
7
alp=func5(7,3)
print(alp.__next__())
1
print(alp.__next__())
4
print(alp.__next__())
7
print(alp.__next__())
Traceback (most recent call last):
File "<pyshell#192>", line 1, in <module>
print(alp.__next__())
StopIteration
Функция отработала последнюю итерацию, поэтому дальнейшее выполнение невозможно. Функция-генератор используется один раз.
6. Локализация объектов в функции.
6.1. Прмеры.
Пример 1.
glb=10
def func7(arg):
loc1=15
glb=8
return loc1*arg
res=func7(glb);res
150
При получении результата использовались значения локального объекта loc1 и переданного глобального объекта glb
10*15=150
Значение глобального объекта glb не изменилось.
Пример 2.
Ошибка в использовании локального объекта.
def func8(arg):
loc1=15
print(glb)
glb=8
return loc1*arg
res=func8(glb)
Traceback (most recent call last):
File "<pyshell#209>", line 1, in <module>
res=func8(glb)
File "<pyshell#208>", line 3, in func8
print(glb)
UnboundLocalError: cannot access local variable 'glb' where it is not associated with a value
Локальная переменная glb инициализирована позже попытки вывести её.
Пример 3.
glb=11
def func7(arg):
loc1=15
global glb
print(glb)
glb=8
return loc1*arg
res=func7(glb);print(res)
11
165
glb
8
При расчете возвращаемого значения использовано значение переменной glb, которое было передано в качестве аргумента функции arg. Однако само значение глобальной переменной glb изменилось, так как мы локализировали переменную дескриптором global.
6.2. Выявление локализации объекта.
globals().keys()
dict_keys(['__name__', '__doc__', '__package__', '__loader__', '__spec__', '__annotations__', '__builtins__', 'os', 'random', 'rn', 'f_in', 'sys', 'tmp_in', 'kort20', 'summ', 'x', 'fun_arg', 'logistfun', 'zz', 'b1', 'b2', 'b3', 'b4', 'b1234', 'slozh', 'qq', 'dic4', 'qqq', 'e1', 'dd2', 'qqqq', 'func4', 'a', 'func3', 'sps1', 'func2', 'kort', 'anfun1', 'math', 'anfun2', 'anfun3', 'func5', 'mm', 'alp', 'glb', 'func7', 'res', 'func8'])
locals().keys()
dict_keys(['__name__', '__doc__', '__package__', '__loader__', '__spec__', '__annotations__', '__builtins__', 'os', 'random', 'rn', 'f_in', 'sys', 'tmp_in', 'kort20', 'summ', 'x', 'fun_arg', 'logistfun', 'zz', 'b1', 'b2', 'b3', 'b4', 'b1234', 'slozh', 'qq', 'dic4', 'qqq', 'e1', 'dd2', 'qqqq', 'func4', 'a', 'func3', 'sps1', 'func2', 'kort', 'anfun1', 'math', 'anfun2', 'anfun3', 'func5', 'mm', 'alp', 'glb', 'func7', 'res', 'func8'])
globals().keys() == locals().keys()
True
Различий в этих перечнях нет, так как мы работаем в модуле main.
def func8(arg):
loc1=15
glb=8
print(globals().keys())
print(locals().keys())
return loc1*arg
hh=func8(glb)
dict_keys(['__name__', '__doc__', '__package__', '__loader__', '__spec__', '__annotations__', '__builtins__', 'os', 'random', 'rn', 'f_in', 'sys', 'tmp_in', 'kort20', 'summ', 'x', 'fun_arg', 'logistfun', 'zz', 'b1', 'b2', 'b3', 'b4', 'b1234', 'slozh', 'qq', 'dic4', 'qqq', 'e1', 'dd2', 'qqqq', 'func4', 'a', 'func3', 'sps1', 'func2', 'kort', 'anfun1', 'math', 'anfun2', 'anfun3', 'func5', 'mm', 'alp', 'glb', 'func7', 'res', 'func8'])
dict_keys(['arg', 'loc1', 'glb'])
'glb' in globals().keys()
True
Перечень locals().keys() показывает локальные переменые той функции, в которой он вызван, то есть локальные переменные функции func8.
6.3. Локализация объектов при использовании вложенных функций.
def func9(arg2,arg3):
def func9_1(arg1):
loc1=15
glb1=8
print('glob_func9_1:',globals().keys())
print('locl_func9_1:',locals().keys())
return loc1*arg1
loc1=5
glb=func9_1(loc1)
print('loc_func9:',locals().keys())
print('glob_func9:', globals().keys())
return arg2+arg3*glb
kk=func9(10,1)
glob_func9_1: dict_keys(['__name__', '__doc__', '__package__', '__loader__', '__spec__', '__annotations__', '__builtins__', 'os', 'random', 'rn', 'f_in', 'sys', 'tmp_in', 'kort20', 'summ', 'x', 'fun_arg', 'logistfun', 'zz', 'b1', 'b2', 'b3', 'b4', 'b1234', 'slozh', 'qq', 'dic4', 'qqq', 'e1', 'dd2', 'qqqq', 'func4', 'a', 'func3', 'sps1', 'func2', 'kort', 'anfun1', 'math', 'anfun2', 'anfun3', 'func5', 'mm', 'alp', 'glb', 'func7', 'res', 'func8', 'hh', 'func9'])
locl_func9_1: dict_keys(['arg1', 'loc1', 'glb1'])
loc_func9: dict_keys(['arg2', 'arg3', 'func9_1', 'loc1', 'glb'])
glob_func9: dict_keys(['__name__', '__doc__', '__package__', '__loader__', '__spec__', '__annotations__', '__builtins__', 'os', 'random', 'rn', 'f_in', 'sys', 'tmp_in', 'kort20', 'summ', 'x', 'fun_arg', 'logistfun', 'zz', 'b1', 'b2', 'b3', 'b4', 'b1234', 'slozh', 'qq', 'dic4', 'qqq', 'e1', 'dd2', 'qqqq', 'func4', 'a', 'func3', 'sps1', 'func2', 'kort', 'anfun1', 'math', 'anfun2', 'anfun3', 'func5', 'mm', 'alp', 'glb', 'func7', 'res', 'func8', 'hh', 'func9'])
kk
85
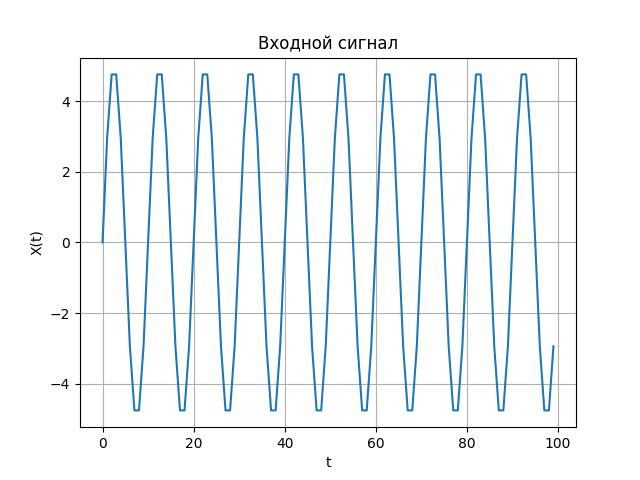
6.4. Моделирование системы.
Система состоит из последовательного соединения реального двигателя, охваченного ООС с тахогенератором в ней, и нелинейного звена типа "зона нечувствительности", при подаче на неё синусоидального входного сигнала.
znach=input('k1, T, k2, Xm, A, F, N = ').split(',')
k1, T, k2, Xm, A, F, N = 2,0.5,3,20,5,10,100
k1=float(znach[0])
T=float(znach[1])
k2=float(znach[2])
Xm=float(znach[3])
A=float(znach[4])
F=float(znach[5])
N=int(znach[6])
k1,T,k2,Xm,A,F,N
(2.0, 0.5, 3.0, 20.0, 5.0, 10.0, 100.0)
import math
vhod=[]
for i in range(N):
vhod.append(A*math.sin((2*i*math.pi)/F))
import matplotlib.pyplot as plt
plt.plot(vhod)
[<matplotlib.lines.Line2D object at 0x000001DEABA54CD0>]
plt.xlabel('t')
Text(0.5, 0, 't')
plt.ylabel('X(t)')
Text(0, 0.5, 'X(t)')
plt.grid(True)
plt.title('Входной сигнал')
Text(0.5, 1.0, 'Входной сигнал')
plt.show()
 Входной сигнал
Входной сигнал
Создание моделей компонентов системы.
def realdvig(xtt,kk1,TT,yti1,ytin1):
"""Реальный двигатель
xtt - входной сигнал
kk1 - коэффициент усиления
TT - постоянная времени"""
yp=kk1*xtt # усилитель
yti1=yp+yti1 # интегратор
ytin1=(yti1+TT*ytin1)/(TT+1)
return [yti1,ytin1]
def tahogen(xtt,kk2,yti2):
"""Тахогенератор
xtt - входной сигнал
kk2 - коэф. усиления"""
yp=kk2*xtt # усилитель
yti2=yp+yti2 # интегратор
return yti2
def nechus(xtt,gran):
"""Зона нечувствительности
xtt - входной сигнал
gran - границы зоны"""
if xtt<gran and xtt>(-gran):
ytt=0
elif xtt>=gran:
ytt=xtt-gran
elif xtt<=(-gran):
ytt=xtt+gran
return ytt
yi1=0;yin1=0;yi2=0
vyhod=[]
for xt in vhod:
xt1=xt-yi2 # ООС
[yi1,yin1]=realdvig(xt1,k1,T,yi1,yin1)
yi2=tahogen(yin1,k2,yi2)
yt=nechus(yin1,Xm)
vyhod.append(yt)
print('y=',vyhod)
y= [0, 0, 0, 0, 0, 0, 0, 0, -10.974148811740466, 31.23160757720293, -8.503430739117402, -24.286442652106217, 120.81546660445824, -150.3828501669592, 12.095016626781707, 253.49964308649874, -550.0372845930702, 482.5059329598621, 183.71880041751297, -1344.6318420666303, 2086.275615417099, -1144.2481204296605, -2002.5012972412562, 5993.340901257227, -7021.903855263193, 1016.1859225809073, 11990.058286540936, -24073.46344205082, 20464.40390004343, 10000.873807285976, -58849.36542455066, 88226.20589713757, -45598.687710122824, -90648.98545320811, 256539.10209617077, -291673.6755433273, 28310.708692509466, 524435.5569749932, -1018521.6679602802, 832902.8430147418, 484167.14580257685, -2534673.285447276, 3695133.6022211737, -1772684.8126889702, -4048961.4995111916, 10934504.469172316, -12066790.472233215, 537460.4167893449, 22860371.582130555, -43018701.06713582, 33776359.86584025, 23024016.448104482, -109006911.79047805, 154563598.85923606, -68253115.38703698, -180186433.63572612, 465587164.0724488, -498418911.61202526, -5342551.979281266, 994798216.431469, -1815232394.0390863, 1365609422.6048367, 1080971013.622714, -4682711578.392281, 6458104066.395749, -2598663786.050113, -7993304317.292057, 19805981578.613724, -20554016684.21948, -1417709580.6659634, 43221537691.59888, -76524385729.04279, 55032176844.606346, 50227527357.92703, -200940968969.65836, 269533128283.83582, -97577756381.57198, -353572609482.7477, 841761652588.4781, -846174323954.32, -110503084200.59412, 1875049564511.6016, -3222968908487.364, 2209697878532.739, 2313801571412.487, -8613488719461.749, 11236044539575.766, -3599659176361.6226, -15598471845164.156, 35742233215790.65, -34772822009814.105, -6815175958331.712, 81227407685562.34, -135611326881975.75, 88368140007882.67, 105814447351992.02, -368841421227173.7, 467834336461247.94, -129716709606099.69, -686476518500955.9]
plt.plot(vyhod)
[<matplotlib.lines.Line2D object at 0x000001DEAF333250>]
plt.grid(True)
plt.xlabel('t')
Text(0.5, 0, 't')
plt.ylabel('Y(t)')
Text(0, 0.5, 'Y(t)')
plt.title('Выходной сигнал')
Text(0.5, 1.0, 'Выходной сигнал')
plt.show()
Выходной сигнал